Marcel Torné Villasevil
Publications
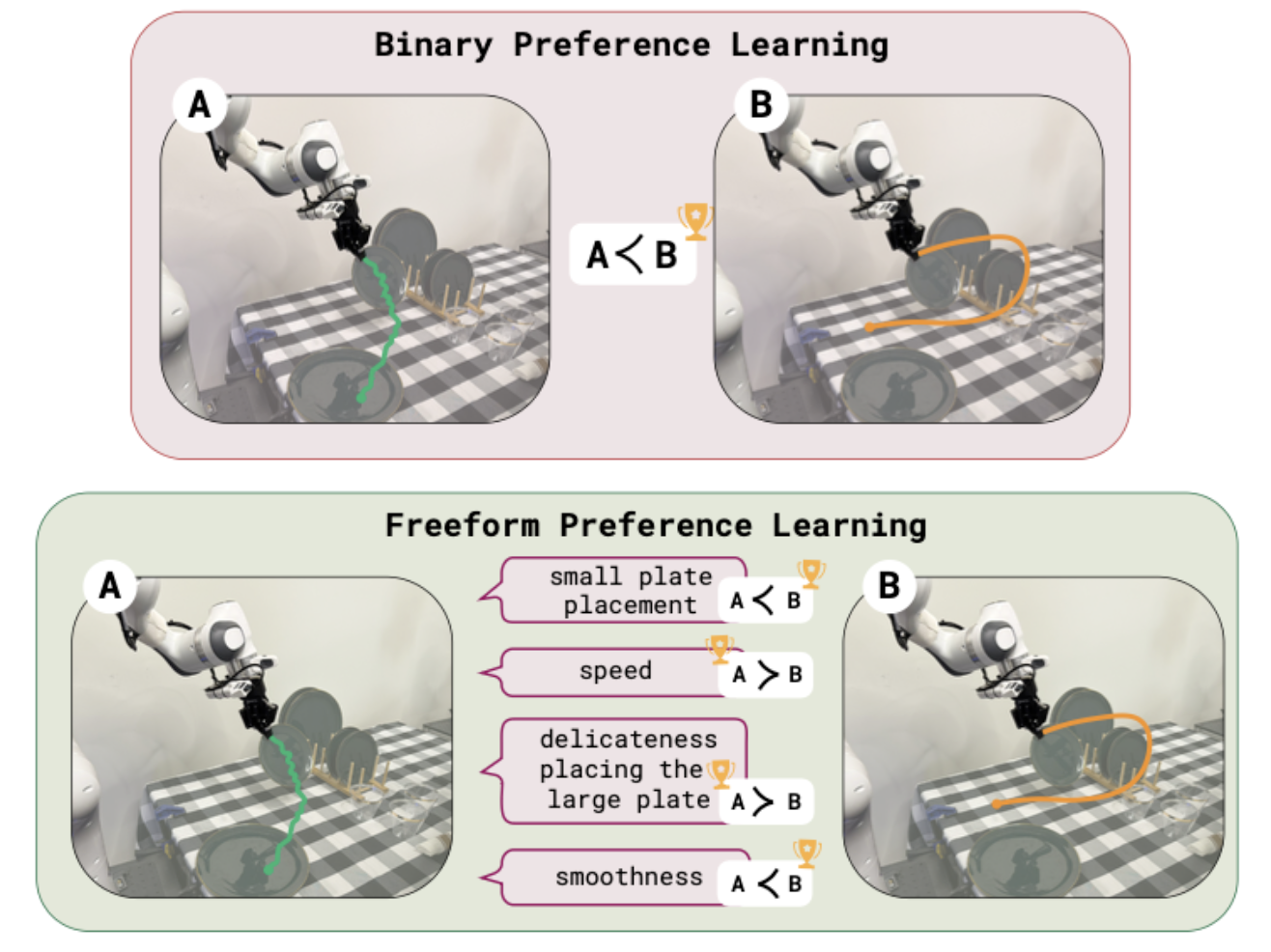
Freeform Preference Learning for Robotic Manipulation
Marcel Torne*, Anubha Mahajan*, Abhijnya Bhat*, Chelsea Finn.
arXiv 2026
/ Website
/ Paper
/ Code
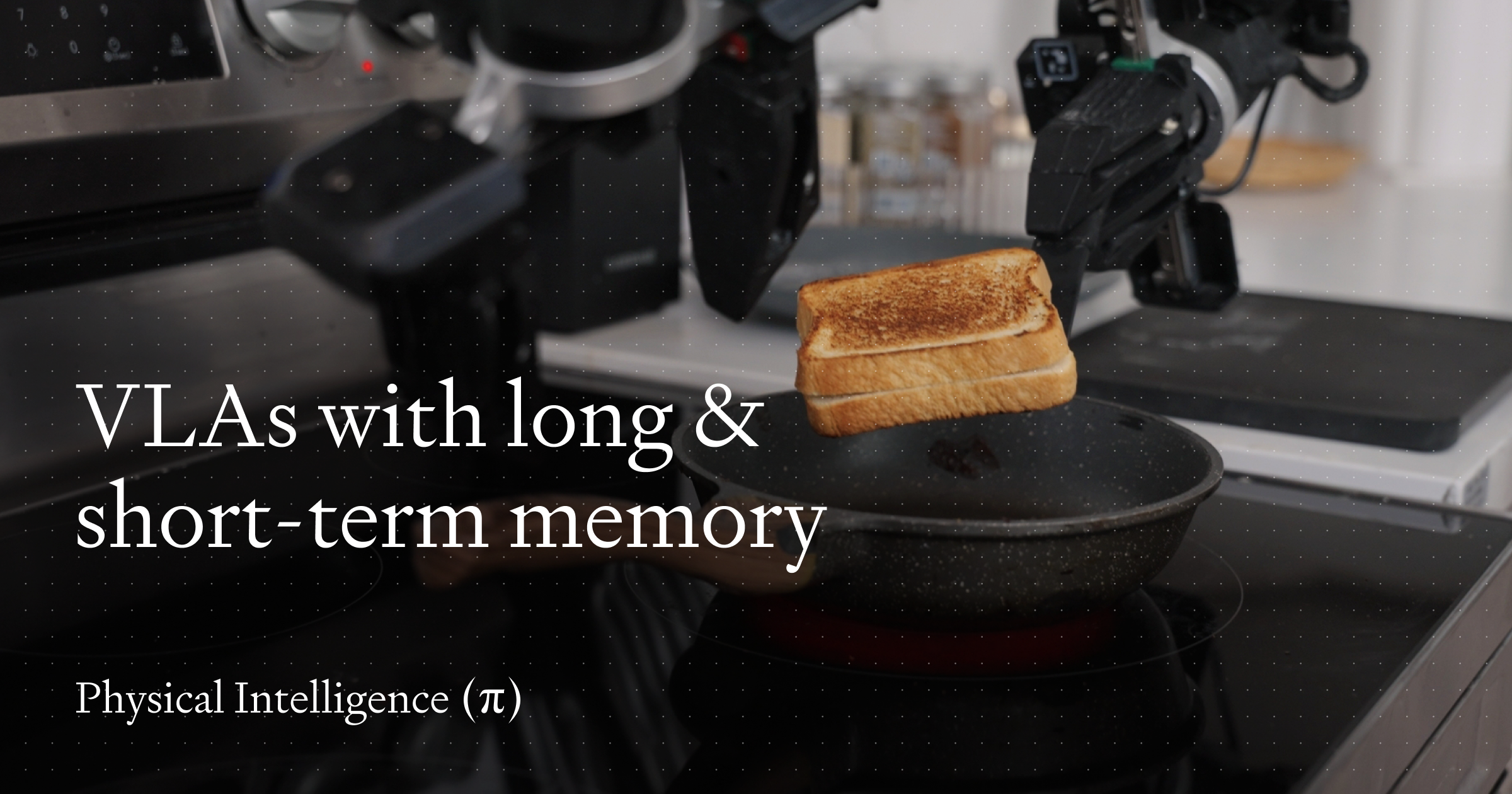
MEM: Multi-Scale Embodied Memory for Vision Language Action Models
Marcel Torne*, Karl Pertsch*, Homer Walke, Kyle Vedder, Suraj Nair, Brian Ichter, Allen Ren, Haohuan Wang, Jiaming Tang, Kyle Stachowicz, Karan Dhabalia, Michael Equi, Quan Vuong, Jost Tobias Springenberg, Sergey Levine, Chelsea Finn, Danny Driess.
arXiv 2026
/ Website
/ Paper
PolaRiS: Scalable Real-to-Sim Evaluations for Generalist Robot Policies
Arhan Jain, Mingtong Zhang, Kanav Arora, William Chen, Marcel Torne, Muhammad Zubair Irshad, Sergey Zakharov, Yue Wang, Sergey Levine, Chelsea Finn, Wei-Chiu Ma, Dhruv Shah, Abhishek Gupta, Karl Pertsch.
arXiv 2025
/ Website
/ Paper
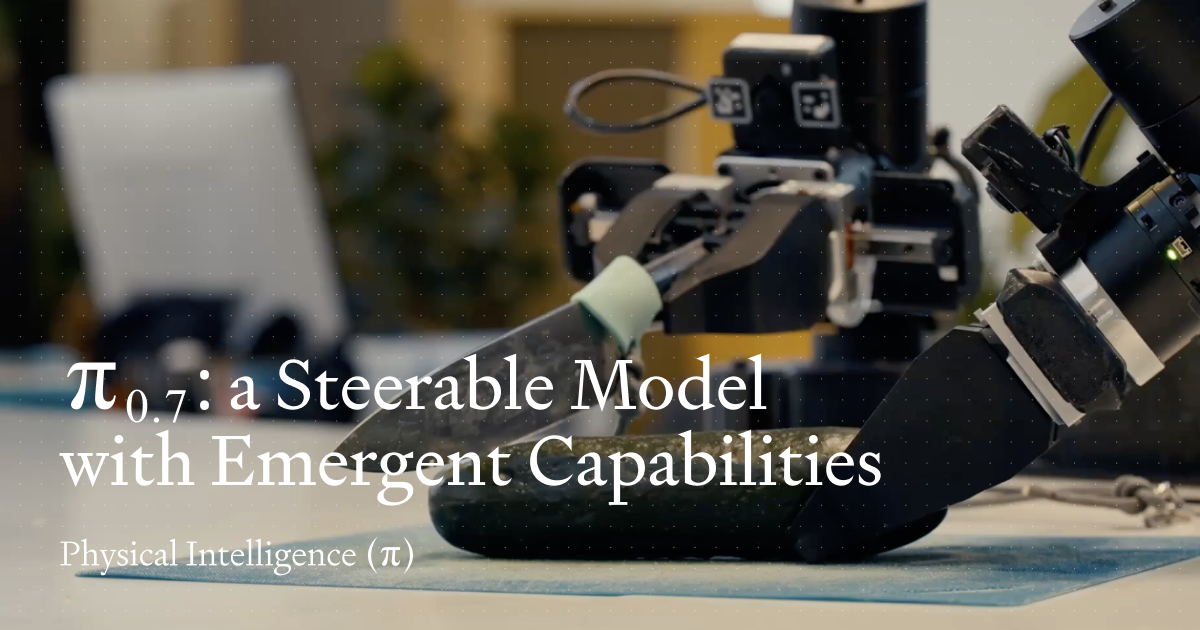
π0.7: a Steerable Model with Emergent Capabilities
Physical Intelligence (Marcel Torne), et al.
arXiv 2026
/ Blog
/ Paper
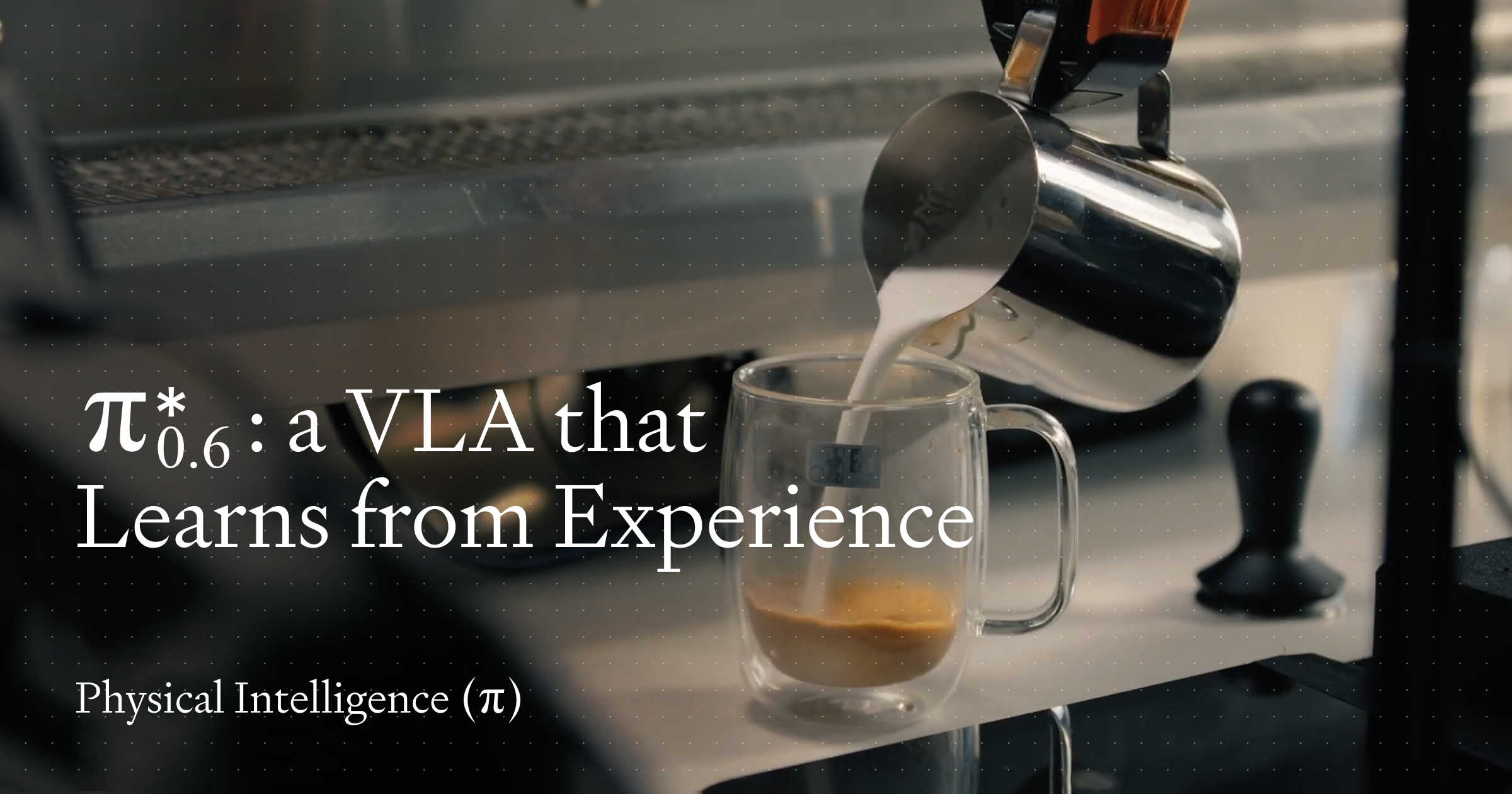
π0.6*: a VLA that Learns from Experience
Physical Intelligence (Marcel Torne), et al.
arXiv 2025
/ Blog
/ Paper
RoboArena: Distributed Real-World Evaluation of Generalist Robot Policies
Pranav Atreya*, Karl Pertsch*, Tony Lee*, Moo Jin Kim, Arhan Jain, ..., Marcel Torne Villasevil, ..., Abhishek Gupta, Chelsea Finn, Sergey Levine, et al.
arXiv 2025
/ Website
/ Paper
Learning Long-Context Diffusion Policies via Past-Token Prediction
Marcel Torne Villasevil*, Andy Tang*, Yuejiang Liu*, Chelsea Finn.
Conference on Robot Learning 2025
(Best Paper Award at the Robot Representations Workshop at RSS 2025)
/ Website /
Paper

Robot Learning with Super-Linear Scaling
Marcel Torne Villasevil* , Arhan Jain*, Jiayi Yuan*, Vidaaranya Macha*, Lars Ankile, Anthony Simeonov, Pulkit Agrawal, Abhishek Gupta.
Robotics: Science and Systems 2025 / Website / Paper / Video
From Imitation to Refinement - Residual RL for Precise Visual Assembly
Lars Anikle, Anthony Simeonov, Idan Shenfeld, Marcel Torne Villasevil , Pulkit Agrawal.
ICRA 2025 / Website / Paper
Reconciling Reality through Simulation: A Real-To-Sim-to-Real Approach for Robust Manipulation.
Marcel Torne Villasevil , Anthony Simeonov, Zechu Li, April Chan, Tao Chen, Abhishek Gupta*, Pulkit Agrawal*.
Robotics: Science and Systems 2024 / Website / Paper / Video
Media Coverage: Tech Crunch / MIT CSAIL Spotlight Video

Breadcrumbs to the Goal: Goal-Conditioned Exploration from Human-in-the-loop feedback.
Marcel Torne Villasevil , Max Balsells i Pamies, Zihan Wang, Samedh Desai, Tao Chen, Pulkit Agrawal, Abhishek Gupta.
NeurIPS 2023 / Website / Paper / Code / Talk
Media Coverage: MIT News Spotlight
Autonomous Robotic Reinforcement Learning with Asynchronous Human Feedback.
Max Balsells i Pamies*, Marcel Torne Villasevil* , Zihan Wang*, Samedh Desai, Pulkit Agrawal, Abhishek Gupta.
CoRL 2023 / Website / Paper / Code
Media Coverage: TechXplore
Master Thesis: Goal Conditioned Exploration from Human in the loop Feedback
Marcel Torne Villasevil. Thesis advisor: Prof. Pulkit Agrawal
Master of Engineering Degree at Harvard University, thesis done while at MIT at the Improbable-AI Lab
Master's Thesis
Open Source Projects

DISCO - Distributed Collaborative Machine Learning
Project started by Marcel Torne Villasevil and Paul Mansat, supervised by Professor Martin Jaggi. (2021)
Code available at github.com/epfml/disco and Bachelor's thesis available here.
105 🌟 stars on GitHub
Course Projects
Design Choices for Dual-arm Robotic Manipulation Control
Project developed as part of the final project for the Robotic Manipulation (6.4212) class by Prof. Russ Tedrake at MIT, Fall 2022.
Project report available here.
Behavior Cloning for Mobile Manipulation
Project developed as part of the final project for the Computational Sensorimotor Learning (6.484) class by Prof. Pulkit Agrawal at MIT, Spring 2022.
Project report available here.
Multi-Agent Reinforcement Learning for Collective Transport
Project developed as part of the final project for the Biologically-inspired Multi-Agent Systems (CS289) class by Prof. Radhika Nagpal at Harvard University, Fall 2021.
Project report available here.